LIDAR Engine on a Chip
In a typical optical phase lock loop, we usually try to "lock" the frequency and phase of few lasers together. However, sometimes it is useful to have precise control over the frequency of one laser, without using an extra reference laser. For example, changing the frequency of the laser in a predicted way can be very useful for applications in ranging and 3D imaging, as well as for spectroscopy. Consider the following setup:
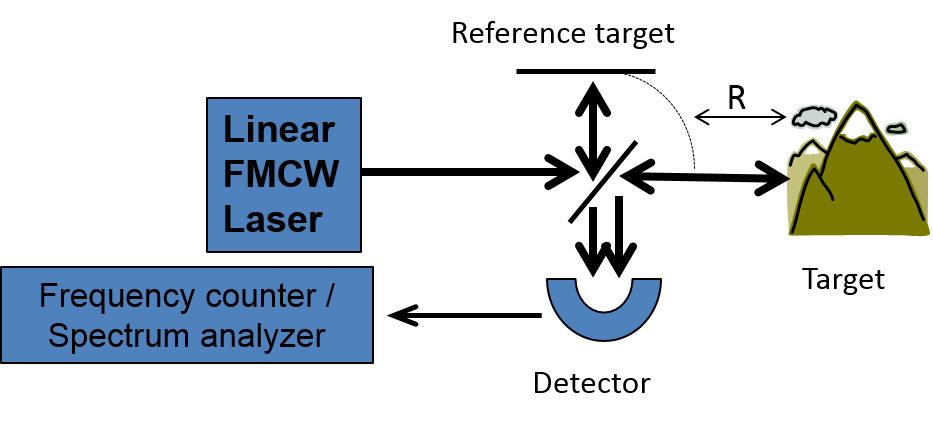
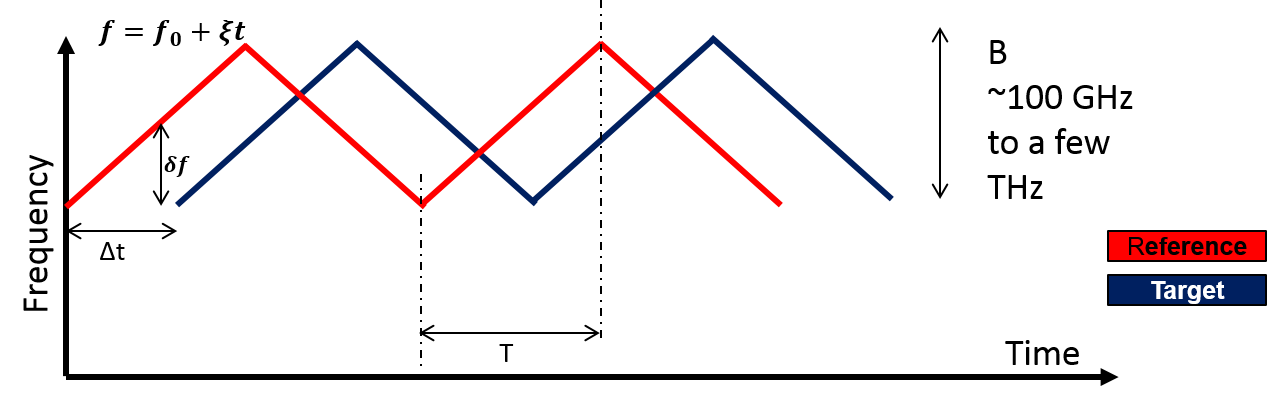
If the frequency of the laser is changing linearly in time, the beat signal between reflections from the target and the reference mirror would oscillate as a perfect sine wave. The frequency of that sine wave can be used directly to find the distance to the target, as can be seen in the diagram below:
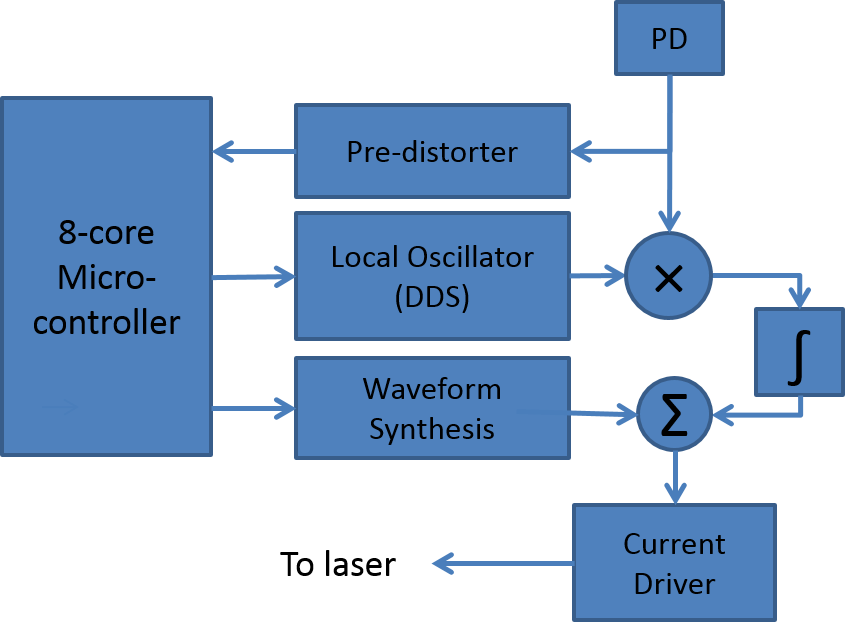
One of the challenges in constructing such a system, is to make sure the frequency chirp is exactly linear. Imperfections in the chirp rate will directly decrease the resolution of your measurement. To do that we constructed another phase-lock-loop:
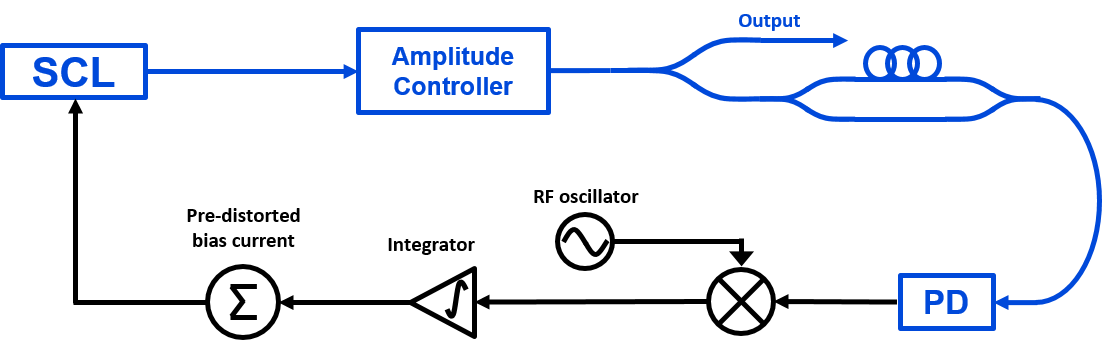
To understand this loop, consider the following example: Assume we are trying to measure a fixed distance between two mirrors. We already know that if the chirp is perfectly linear, we will get a perfect sine wave beat. The idea is simple. Just reverse that logic - Make sure the chirp is linear by locking that beat signal to an electronic RF oscillator.
We now have a very nice way to control frequency chirps. If we could integrate the whole thing on a chip we will end up with a cheap, light and efficient system that can take 3D images.
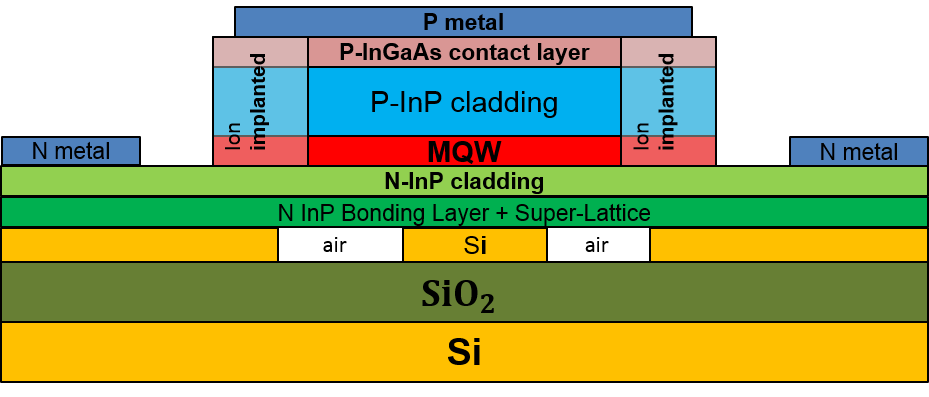
A perfect candidate for this idea is the hybrid Si/III-V platform, since it integrates both passive and active components.
| |
 |
Passive devices | Active devices |
Without going into too many details, here are some of the components we have implemented:
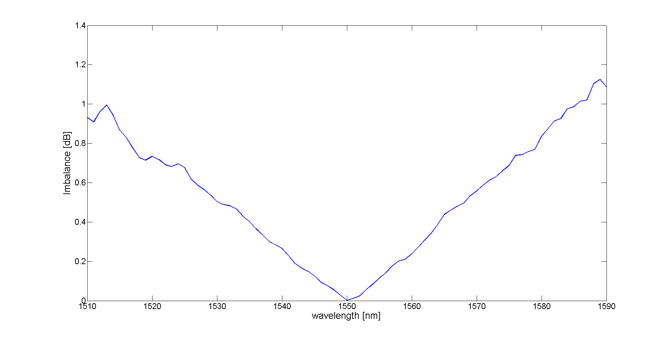
- Unbalanced interferometer with ultra-long spiral delay line (11 cm)
- Broadband couplers
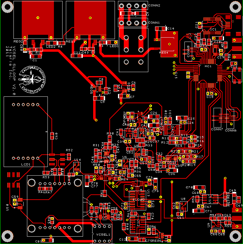
- Printed circuit board for the feedback loop

 |
 |
We have used our fabricated devices to linearize frequency chirp of a commercial VCSEL:
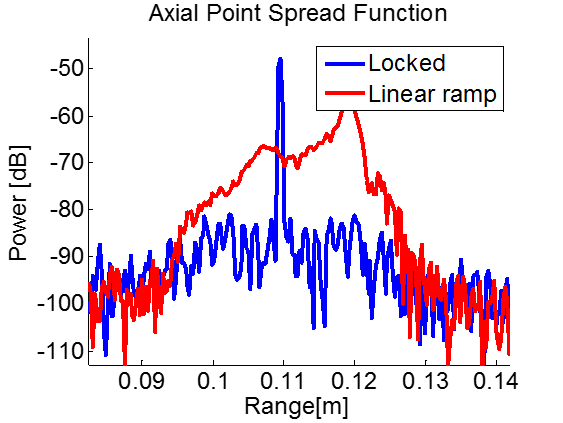
Note the great improvement in resolution due to the linearization process!